

Matthew is a graduate student of mechanical engineering at Tennessee Technological University. He is studying mobile robotics, climbing, and dry adhesives.
Publications
Powelson, M., & Canfield, S. L. (2017). Design of Track-Based Climbing Robots Using Dry Adhesives. Proceedings of Student Research and Creative Inquiry Day, 1
Castro, G., & Powelson, M. (2017). Design of adhesive surface for track-type climbing robots. Proceedings of Student Research and Creative Inquiry Day, 1.
Comber, D. B., Pitt, E. B., Gilbert, H. B., Powelson, M. W., Matijevich, E., Neimat, J. S., … & Barth, E. J. (2016). Optimization of curvilinear needle trajectories for transforamenal hippocampotomy. Operative Neurosurgery, 13(1), 15-22.
Experimental investigation on attachment properties of dry adhesives used in climbing robots
Projects
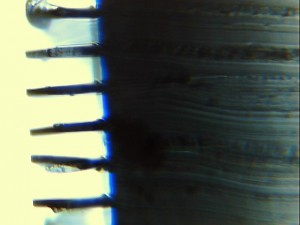
Micromachining for the Fabrication of Fibrillar Dry Adhesives
Gecko inspired dry adhesives are an area of increasing research interest. Particularly of interest for climbing robots are patterned elastomer adhesives which allow for the conformance of hair like structures to microscopic surface features such that atomic forces become relevant. Directional dry adhesives have shown promise for robotic applications in the literature, however, these adhesives are not commercially available. This research involves micromachining molds such that these adhesives can be cast in a reliable and repeatable manner.
Dry Adhesives for Track-Based Climbing Mobile Robots
Track based climbing have often been used in climbing due to their robust climbing ability and high payload potential. However, these robots have typically made use of either magnets or high-powered suction devices as their adhesive elements. This research focuses on the design of track based climbing mobile robots that utilize dry adhesives as their adhesive elements, particularly in the case of robots with force distributing suspensions. The focus is on the adapting of the knowledge base currently available in literature for track based systems to robots with the unique adhesive properties specific to dry adhesives. This work involves determining adhesives suitable for climbing robots, characterizing those adhesives, and designing the robot and suspension system for such robots to incorporate those models. The goal is develop a comprehensive method for designing these systems in an informed manner, such that engineers could use a data driven design process rather than relying on intuition an iteration.


Recent Comments